서천동 OB(정모,정관은 못 나오시지만 서천동 통장에는 매달 매달 쭉 이름이 찍힙니다^^) 여주의 오규섭님은 로스만디 G-11과
미드 7인치 굴절을 최소한 15년간 끼고 사셨습니다. 집 개인 돔 관측소, 학교 관측지원, 회사 관측지원, 동내 주민 관측지원등
오직 한조의 장비로 별생활을 하십니다. 제가 콘넥터, 배터리등 2~3년에 한번씩은 손을 봐주는데(수동적으로 ㅋㅋ),
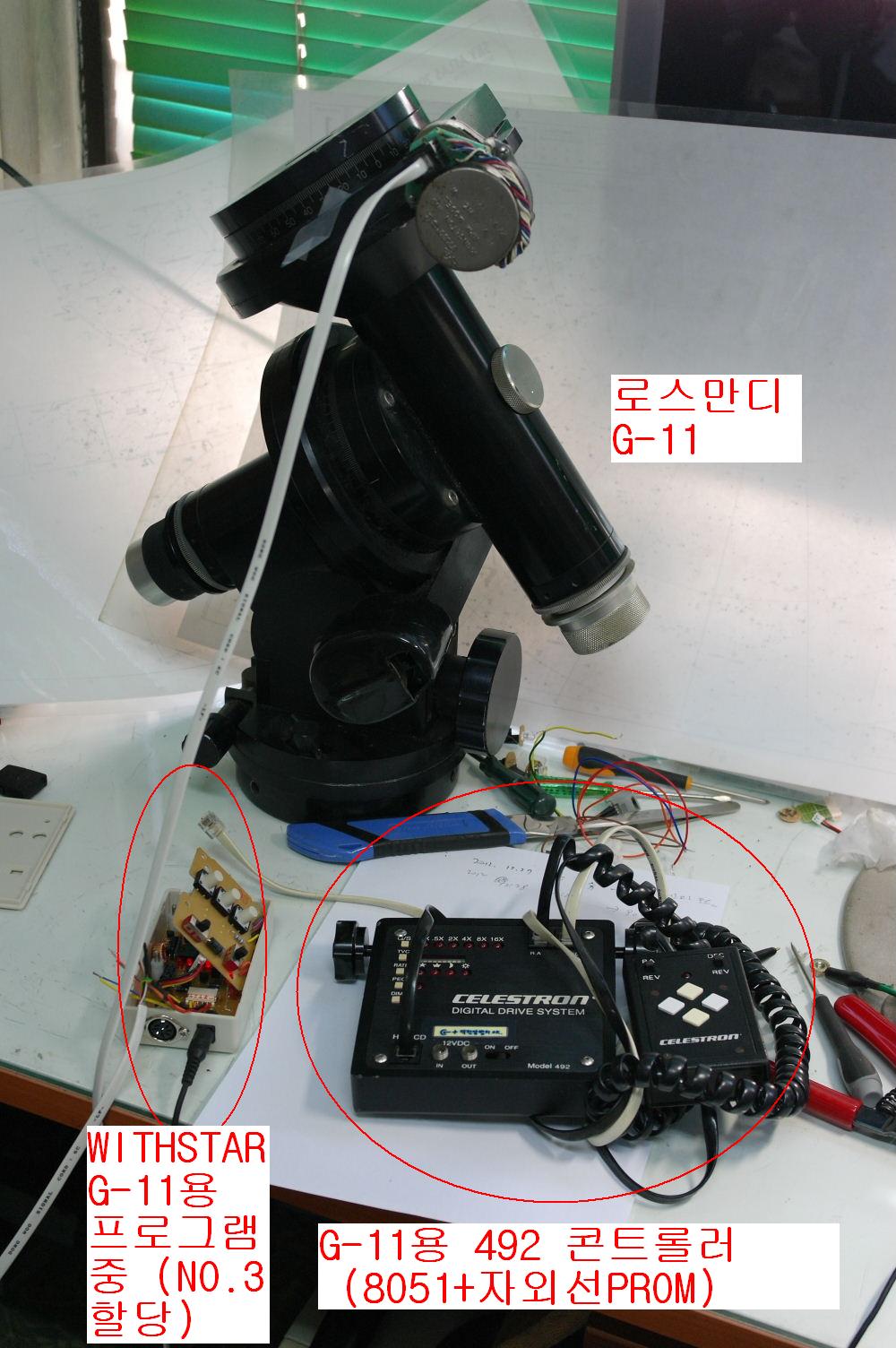
지난 금요일 운영하시는 어린이집에서 애들에게 달응 보여주다가 G-11용 로스만디 콘트롤러인 492가 말썽을 일으킵니다.
어제 뜯어보니 오래된 전자부품이 들어있습니다. 마이콤의 최초 상용버전이라고 할수있는 8051과 자외선용 창이 달린
PROM 이 있습니다. 비정상적인 오동작을 몇번 하더니만 작동을 안합니다. 그제 마당에서도 이상동작와 작동불가가 반복
된것이 재현된겁니다. 에전 같으면 어떡해든 살려보려고 애를 몇달 쓸테지만, 이젠 그냥 뚜껑을 덮고 골동품으로 가지고
계시라고 할수 있겟습니다.
여러 기능(달-별-해등등 구동 속도 조절기능)은 빼고 항성시와 최고배속만 내는 WITHSTAR를 달면되니까요.
손대는 김에 비어논 할당번호 3을 배당했습니다. 어젠 할당번호 0인 겐코의 구동속도와 비교하려고 밤새도록
돌리고 있습니다. 약 한시간 후인 11시17분이 되면 12시간 겐코모드로 도는 것이 끝납니다. 차이가 나는 부분을
이용해서 G-11의 웜(360으로 찾음)과 기어박스, 스텝모터의 회전규격을 근사치로 역산할수 있습니다.
현재로는 켄코구동펄스의 4/3 를 적용해야 할것 같습니다. 12시간 후에는 기어박스와 모터부분을 분리해서
해체하지 않는 범위에서 손과 눈으로 기어비와 모터의 스텝수를 여러 도구와 방법으로 알아야(근사치인 4/3의
정확한 값(유효숫자 6자리)을 알아서 모터구동용 펄수 주기값(XYZ.***** msec)을 결정지어야 합니다.
그후엔 withstar 의 빈 자리인 3번에 할당하고 최고속도 16배속(492의 초고속도가 16배속)에 맞는 값을 넣어야지요.
범용 스텝모터 구동장치 withstar는 이런 용도를 위해서 만들었는데 잘~ ~ 만들었음을 또 만족합니다^^
-
12시21분 추가
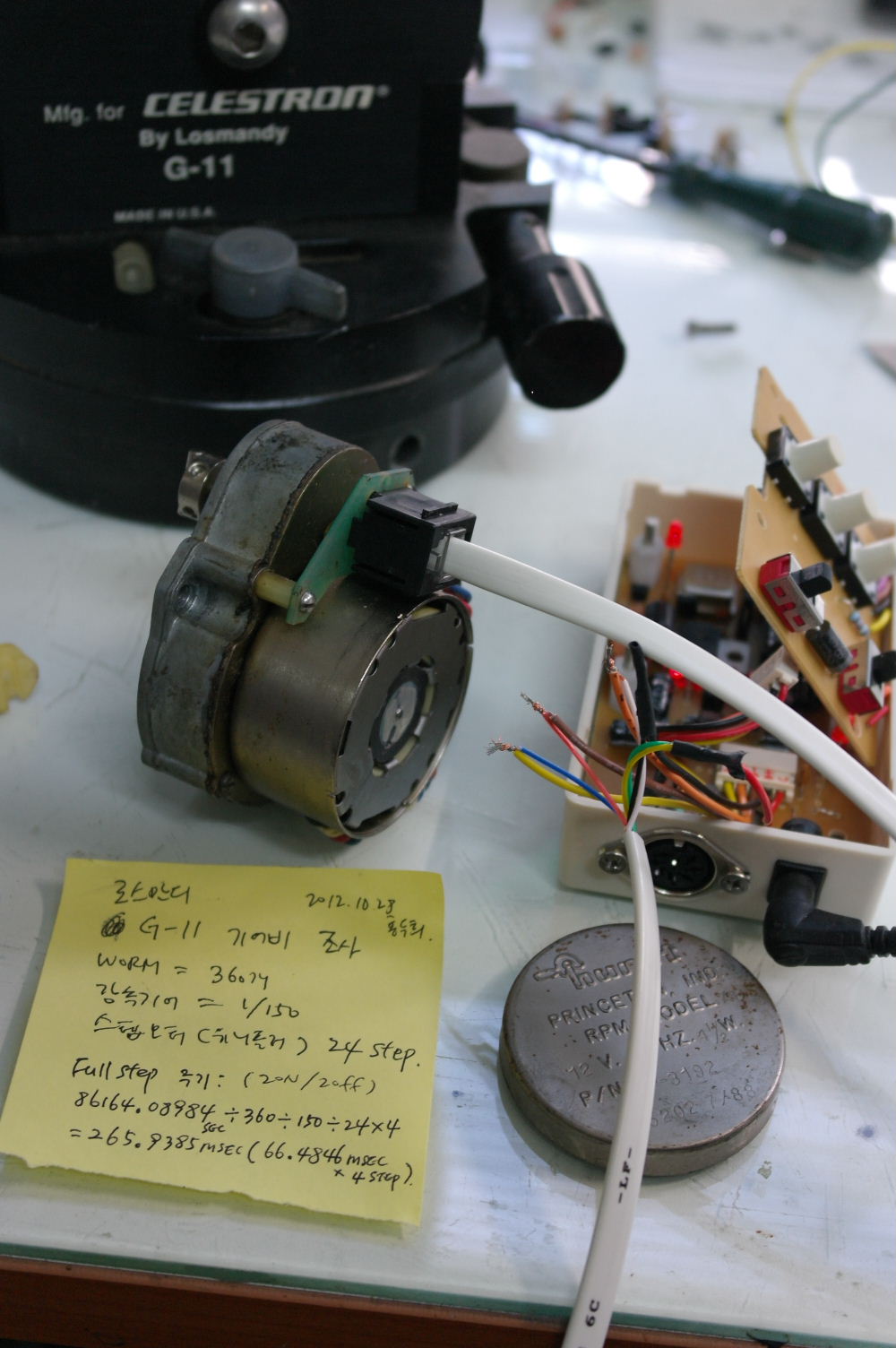
G-11의 기어 감속비등을 파악했습니다.(모터를 천천히 손으로 돌리면서 감속기어축이 몇배로 감속되는 지........, 스텝모터는 정수의 4배수 일텐데 얼말까??? 등)
스텝모터 뚜껑이 열리고, 스텝모터를 손으로 돌릴수 있게 외부로 크게 보이니 기어박스등 분해않고 쉽게 조사 가능했습니다.
로스만디 G-11 ; WORM(360), 감속기어(1/150), 모터(유니폴러 24스텝) -> FULL STEP(2 ON/2 OOF) 구동, 모터펄스주기 역산 = 265.9385MSEC(66.4846MSEC)
모든속도에서 12V, WITHSTAR 설정모드 3에 배당.
-
29일 0시30분 추가.
G-11 규격을 찾아보면 추적 정밀도 인지 뭐지 몰라도 0.5아크초(ARCSECOND) 로 적혀있습니다.
제사진의 메모 글씨 제일 끝에 있는 값이 44.5msec 입니다. 이 값은 이 시간만큼 모터에 전기공급을
하고 이후에 다른 전기를 공급해서 모터를 돌게 하는 이야기 입니다. 이 값이 작아야 모터가 부드럽게
돕니다. 이값은 시간이며(msec)이며 1초당 몇번 반복되는냐로도 표현을 하는데 이 값의 역수는 1/0.0445
=22.5 pulse per second 이며 이 값이 클수록 부드럽게 도는 겁니다.
이 값(44.5msec)과 위의 0.5아크초와는 분명 관계가 있을겁니다.
44.5msec 는 시간의 초이며, 0.5아크초는 각도의 초여서 했갈립니다만,,,,, 조금 주의를 하시면,,,,,
44.5msec 는 적도의 한바퀴를 약24시간(약 몇분 모자라는 항성일)도는 도는 것이기 때문에
한바퀴를 돌려면 44.5msec가 24 h X 60 m X 60s / 0.0445 = 1,941,573번 필요하게 됩니다.
한바퀴는 각도로 따지면 360 d X 60 m X 60s = 1,296,000 초가되고,
1,296,000초를 1,941,573으로 구분(분해)하니까 1,296,000/1,941,573 = 0.66 이 나오네요
제 계산으로는 0.5arcsec 가 아니라 0.66 arcsec 가 나옵니다. ㅎㅎㅎ
( 2on/2off인 full step 이 아니라 3on/5off 의 half step으로 구동한다면(492고장으로 알수 없었습니닫) 0.33arcsec 고요)
-
29일 17시50분 추가 - test pass
어제밤 21시 50분 0초에 G-11을 돌리면서 눈금에 쪽지를 붇였습니다.
오늘밤 21시 45분 56초에 어제 그 눈금위치에 오면 OK 지만
눈금이 있으니 이쯤에서 전원은 빼도 되겠네요.
몇달전에는 눈금이 없어서 레이저 포인터가 한바퀴 돌때까지 기다렸지만요.
(눈금 보다는 레이저 포인터가 정밀(1초 오차 가능)하지요)
사진 찍힌 순간의 시간이 17시21분 이니 어제 21시 50분에서
2시간10분 + 17시21분 = 19시간 31분이 지났으며, 23시간 56분을
1항성일(초는 휴대폰시계라 생락)로 놓고 회전한 각도는
19시간31분(1140+31=1171분)/23시간56분(1436분) X 360도 = 293.6도
293.6-270(90도 눈금 3번 지났습니다) = 23.6도를 지시하면 됩니다.
사진의 눈금은 67도근처(90도 눈금에서 왔습니다), 그러니까 23도
정도 온겁니다.
결론 ; TEST PASS^^(모델3 G-11용)

-
11월2일 3시45분 추가.
3층으로된 기판을 케이스에 잘 넣었습니다. 작동 잘 되고요. x2와 x16 두개뿐이어서(딴딴한 스위치를 선정해서 2개모드만 됩니다)
조금 불편할수도 있지만 데미지 콘트롤이라....
망가진 오리지널 콘트롤러를 보자니 내가 여기서 포기하면 영영 끝일것 같아서 뚜껑을 열었습니다.
이 물건(492 콘트롤러)는 이번에 3군데가 고장 났습니다.
1)적위 전환 스위치의 내부에 있는 4개의 접점중에 1개가 미작동 ( 간신히 분해해서 접점을 재생 했습니다.)
2)모터와 콘트롤러를 연결하는 6핀 모듈라 케이블 2개(적경,적위)중에 1개에서 6선중 한선의 접촉이 안되었습니다.
보기에는 멀쩡하고, 다른 소켓(모듈리 핀 검사장비)에서는 접속이 되는데 492 소켓에는 한선이 접속이 안됩니다. 이럴때가 아주 괴롭습니다.
3)492 콘트롤러 본체에 있는 전자부품인 mc3487 의 한개의 입력포트가 죽었습니다. 이포트가 죽는 바람에 다른 신호를 출력하고 있어서
모터가 안 돌았습니다. 마이콤의 신호를 받는 포트인데 임시로 마이콤에서 오는 선을 분리시키고, 임시변통(입력을 강제로 gnd)했습니다.
80c52(8051계열이지요) 또는 prom 이 죽은줄 았았는데 다행입니다.








