얼마전에 이 디지털 셋팅 서클에 대한 문의를 받았습니다.
8년 전에 언뜻 들었던 내용이어서 제가 그때 입수한 자료를 공유해 봅니다.
적도의에는 적경과 적위축에 둥근 띠로 숫자가 적혀 있습니다.
현재의 망원경이 가리키는 위치를 알기쉽게 표현하기 위함이지요.
망원경이 돌아가면 그 숫자도 돌아가니 관측전에 셋팅하면 관측중에 망원경의 적경,적위값을
알수있지요.
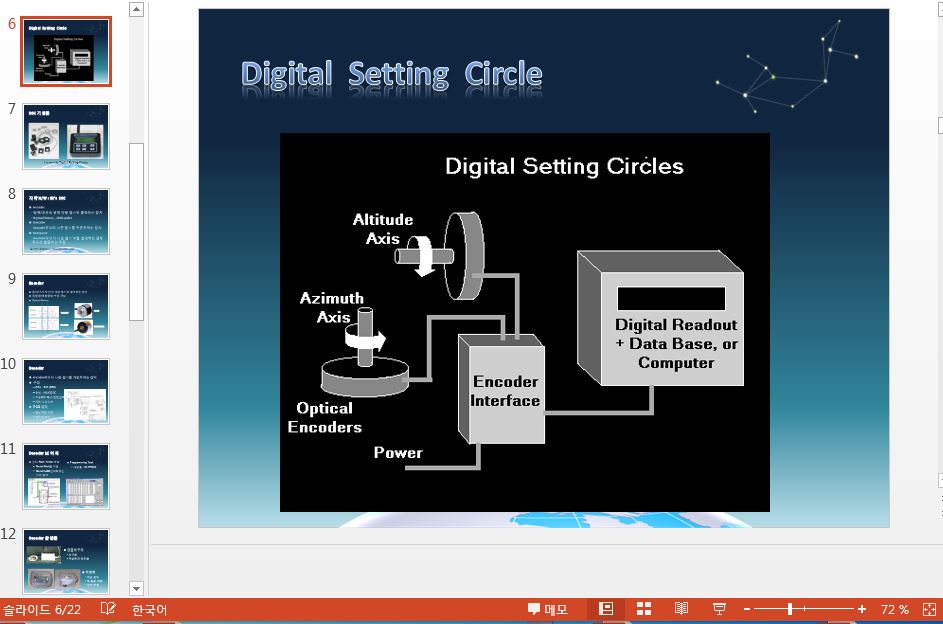
이 아나로그 숫자 표시를 디지털로 좀더 확대(증폭)해서 볼수있게 하는 것이 디지털 셋팅 서클입니다. 물론 경위대, 적도의 모두에서 사용합니다.
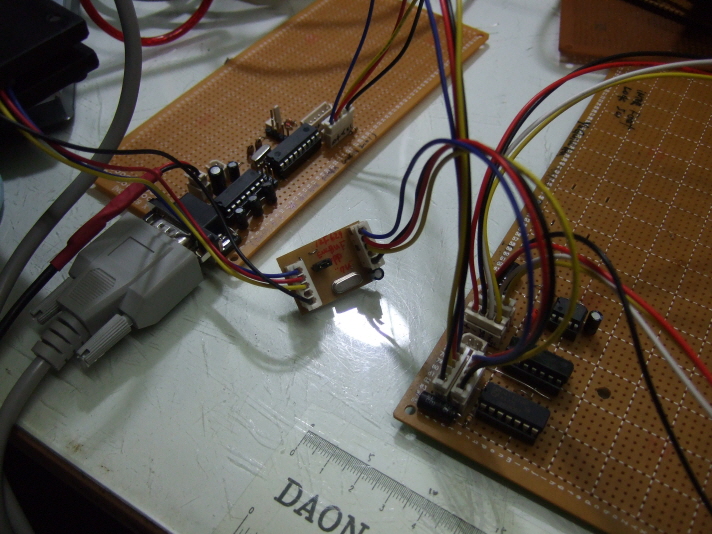
1.축에 물리는 엔코더.
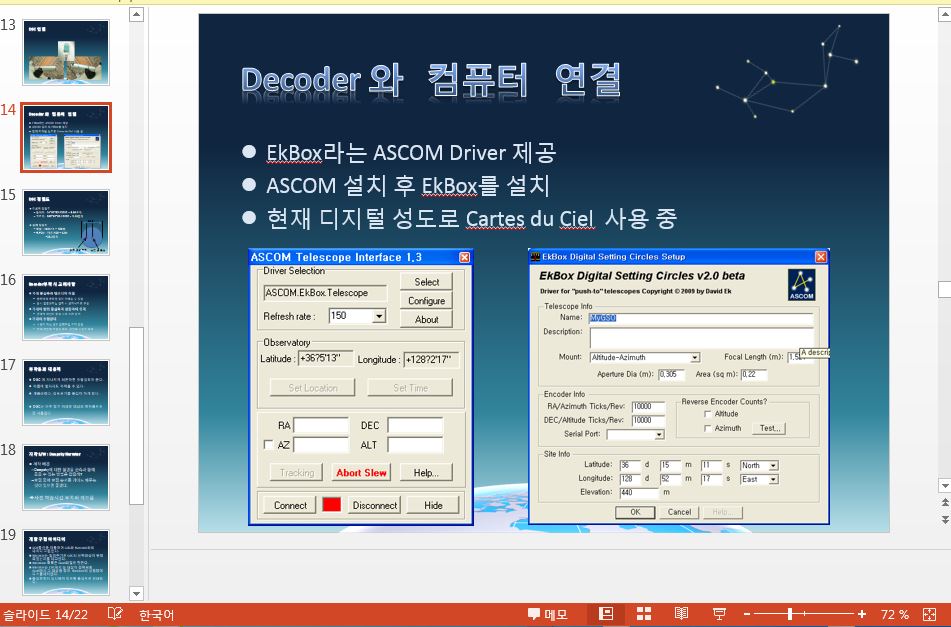
2.엔코더에 연결되어 엔코더의 변경값을 읽고 기억하고 그 값을 pc가 요청하면 전달하는 전자보드(이것이 ek box 입니다). Dave Ek 가 만들어 공개한 겁니다.
(제가 엇그제 만들어 봤습니다. 보드는 잘 작동 됩니다. 아래의 전자성도와는 아직 싱크 못했구요- 2017년 7월3일 현재) .
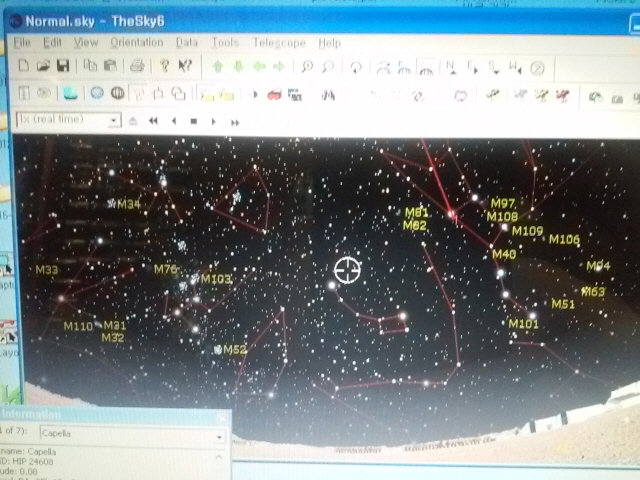
3.전자성도(싱크하고 성도상의 위치를 표시)또는 숫자로 적격,적위를 표시하는 프로그램.
첨부화일은 2009년 발표한 양강선님의 ppt입니다.
-
2017년 7월11일 13시32분 추가
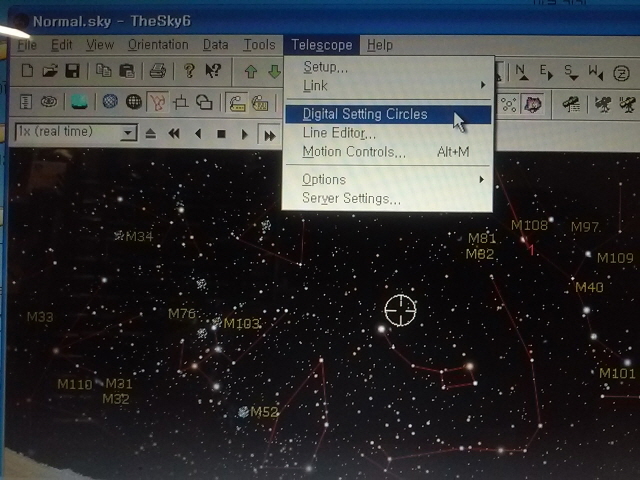
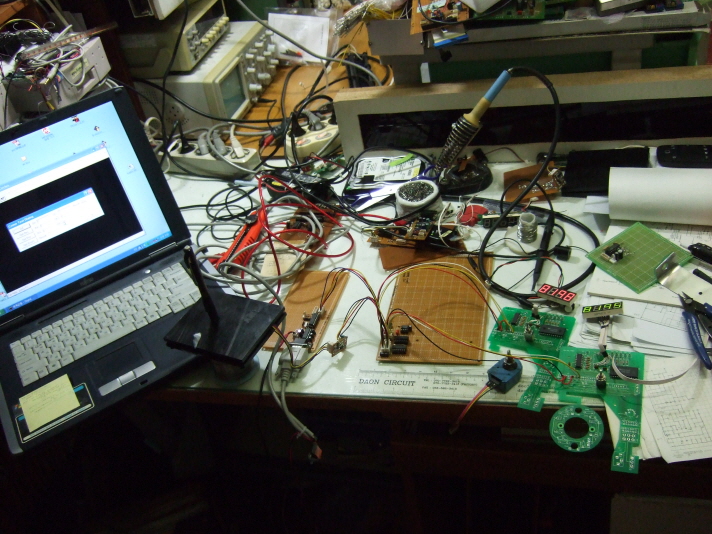
제가 만들어논 엔코더(hp 프린트에서 떼어논 부속으로 새로 제작, 휠 직경을 바꾸어서 분해능이 2-3배임, 200lpi 이며 2700슬릿=10800분해= 8초각( 12일 수정) => 2분각 )
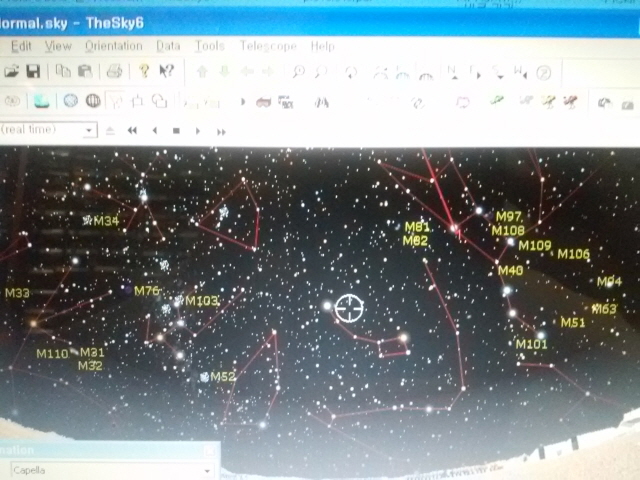
를 공개된 ek box 회로도를 보고 만들어 연결한후에 시리얼 포트가 있는 노트북에(없으면 usb-rs232 변환기 부착) thesky 6 를 실행했읍니다.

-
2017년 8월 8일 20시50분 추가
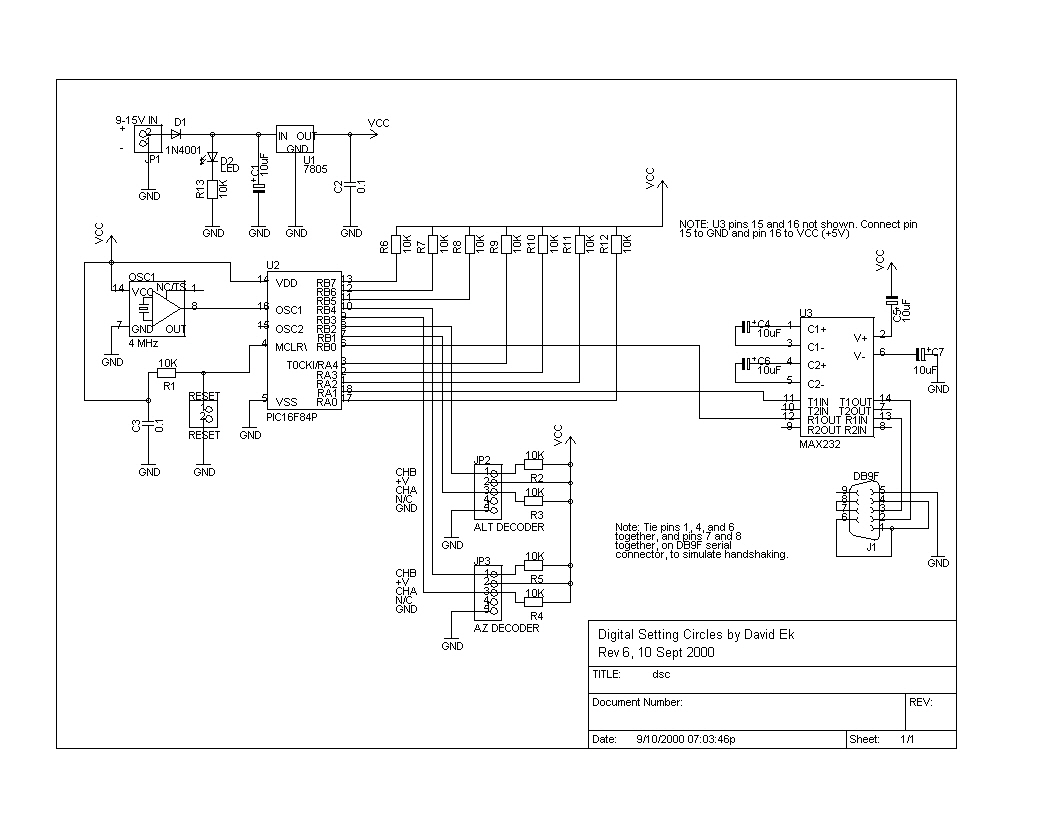
ek box 의 공개된 회로와 소스 파일(hex)은 2종류 입니다.
두 종류의 차이는 사용하는 ic의 차이입니다.
첫번째는 초기 ic는 16f84 를 사용한것이며 버전업 된 16f84a 와는 1:1 호환됩니다.
첫번째용 회로도와 소스파일은 공개되어 있습니다.
참고로 이것입니다. 소스파일은 첨부된 f84_dsc_2009_10_dsc.txt 입니다 이진 화일입니다.
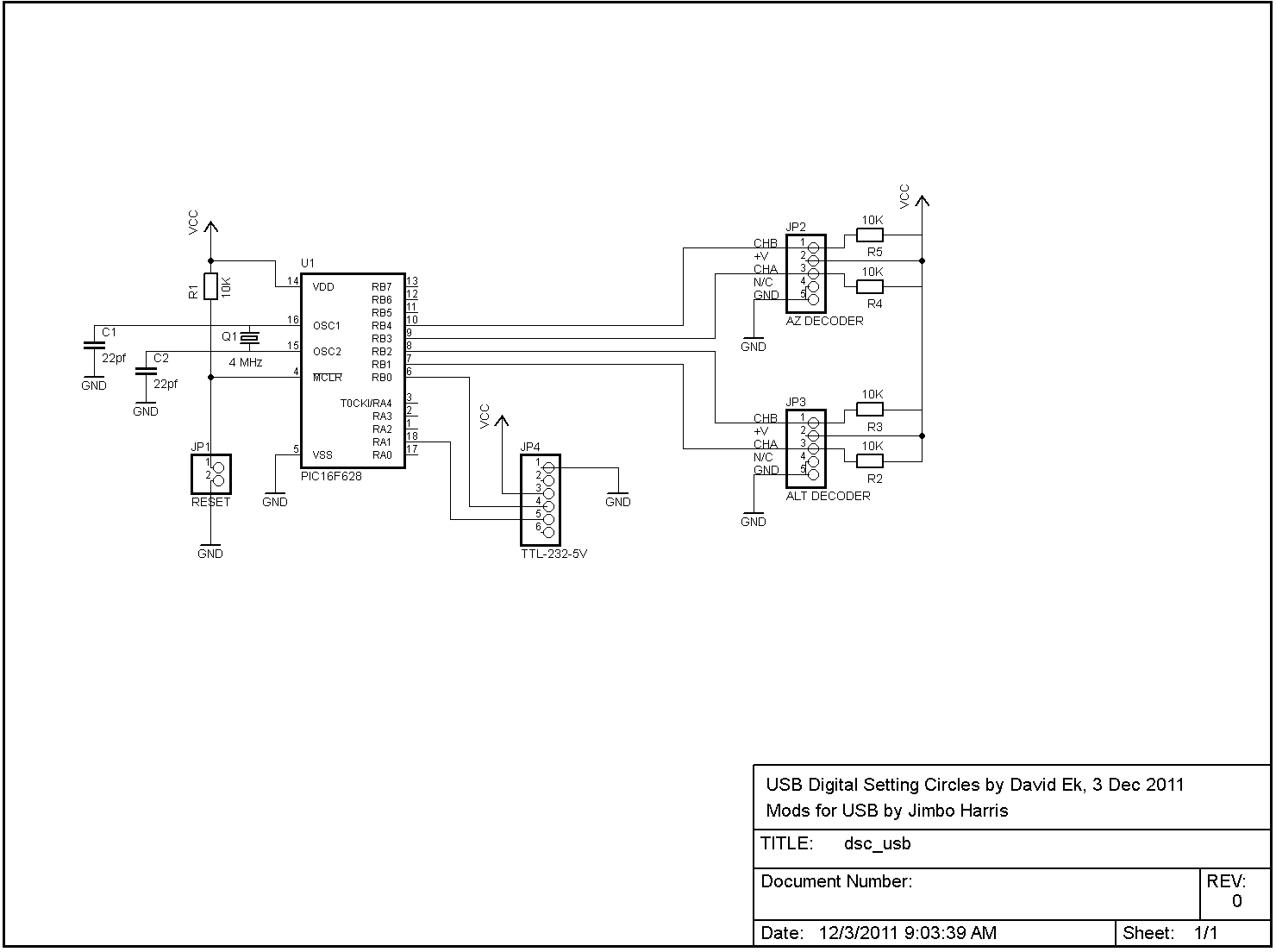
두번째는 16f84/84a 보다 나중에 나온 ic이며 내부기능과 주변 부품을 없앤(기능은 같음) 16f628a 을 사용한 회로입니다.
두번째용 회로도와 소스파일도 공개되어 있습니다. rs232 통신부분을 뺀것이므로 첫번째 회로의 통신단자에 연결하면
두회로 모두 호환이 됩니다.( 그렇다고 ic 끼리 호환되는 것은 아닙니다. , ic가 외부와 연결되는 최종 입출력 기능이 같다는 겁니다.)
참고로 이것입니다. 소스파일은 첨부된 2011_12_dsc_f628.txt 입니다 이진 화일입니다.
회로도와 소스화일을 링크 걸지 않고 이곳(서천동)에 복사한것은 서천동 홈페이지가 ek box 홈페이지보다 더 오래돼었고, 또 더 오래동안 유지될거기 때문입니다.
ek box 홈페이지 ; http://eksfiles.net/digital-setting-circles/
제가 두 회로 모두 테스트를 해 보았습니다. 모두 잘 작동 됩니다.
엔코더의 값을 이 보드가 읽고, 또 pc등에 전달하기 때문에 엔코더가 고속으로 회전하면 일부 엔코더값을 잃을수 있는 문제(제가 20 여년전 겪은 문제)가
있습니다. 엔코더 값을 잃지 않으려면 전용 보드를 만들던지 전용 칩을 사용해야합니다. ek box 회로에는 전용칩을 사용하지 않았습니다.
ek box 에서도 아주 고속으로 회전을 하면 일부 엔코더 값을 잃는 것을 확인 했습니다. 분해능이 작은 엔코더에서는 오차가 안생기지만
분해능이 큰 엔코더를 순간적으로 빨리 이동(가속도가 매우 크게)하면 오차가 생깁니다.
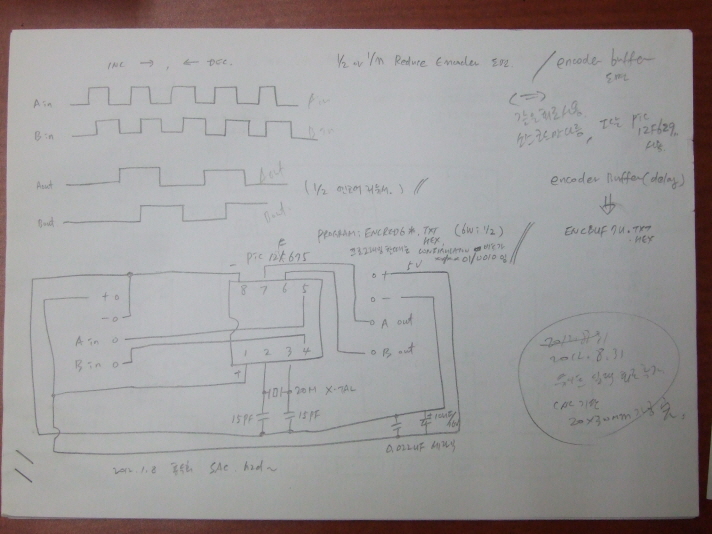
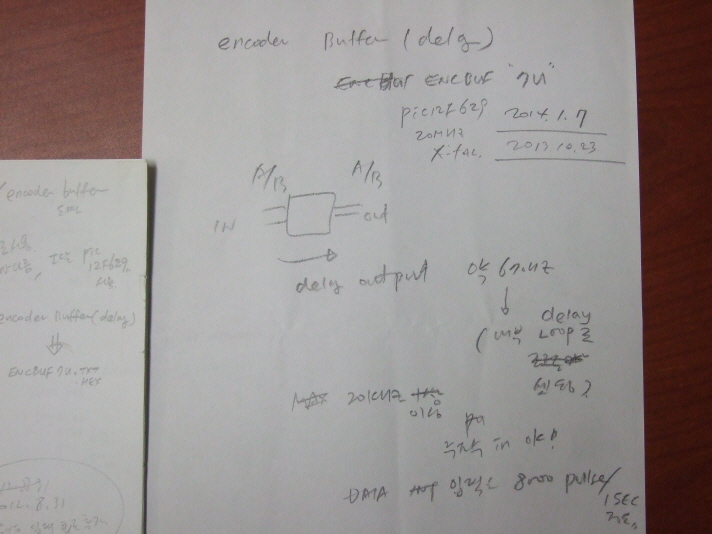
제가 2003 (2013 정정)년 에 만든 엔코더 디레이 버퍼가 있습니다. 만일 ex box에서 오차가 자주 생기면 이것을 엔코더 후단에 넣어 사용하면 됩니다.
한바퀴에 500 펄스짜리 로타리엔코더로 실험을 해보았더니 로타리 축을 잡고 빠르게(거의 타격수준) 돌려보니 1% 의 오차가 발생했으며(original),
엔코더 버퍼를 부착 하였을때는 같은 조건에서 0.2% 정도의 오차가 발생했습니다.
엔코더 디레이 (encoder delay) 구상. http://www.sac-club.co.kr/xe/312766
오늘 ex box의 usb 버전을 테스한것이며 엔코더 오차도 함께 테스트 한것입니다.

-
2017년 8월 12일 22시13분 추가
디지털 셋팅 서클의 원조급인 빅센의 스텔라가이드(김한철옹이 주셨던 것)의 엔코더의 분해능이 얼마인가 실험을 했습니다.
(엔코더는 단자가 +5v/gnd/a/b 4선이 기본이라서 대부분은 호환됩니다.)
750싸이클/1회전 입니다. a/b 각각 750 슬릿이라서 4배인 3000의 분해능이 있습니다.
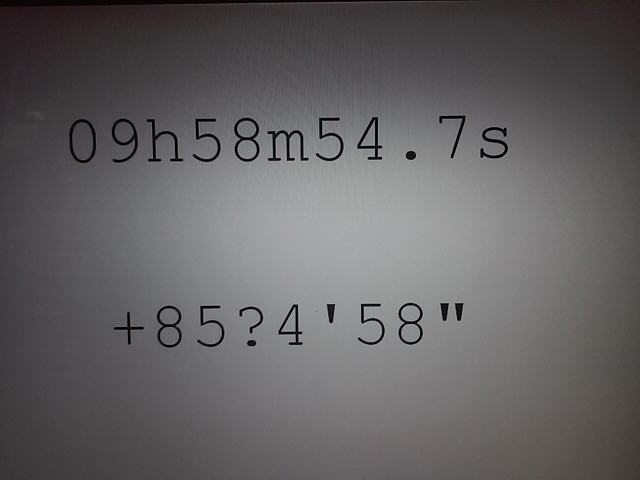
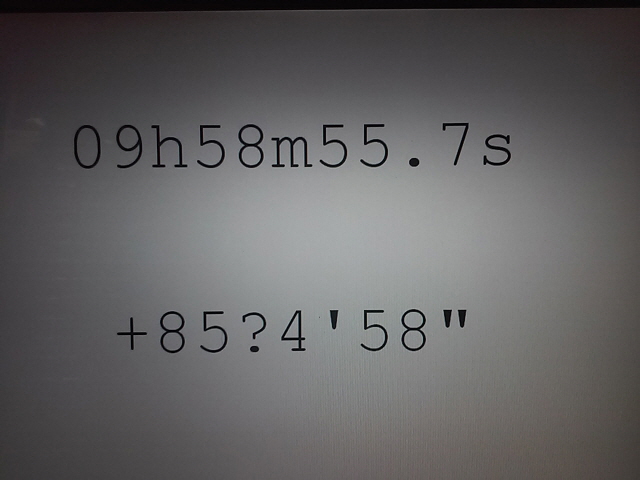
360.0000 도를 정확히 돌린것을 확인 하려고 스텔라가이드의 표시값으로 검증(750 값) 했습니다.
사진의 적위값이 58도12분 과 58도19분이 보입니다. 한 단계만 돌아가게 한것입니다.
12분에서 19분은 7분각
19분에서 7분각을 더한 26분각
26분에서 7분각을 더한 33분각
33분에서 7분각을 더한 40분각
40분각 다음에는 47분이 아닌 48분이 표기 됩니다. 7.2분각씩 늘어나기 때문이지요.


 망원경을 분해 하다가 막히는 부분등을 정리합니다, etx60at, etx...
망원경을 분해 하다가 막히는 부분등을 정리합니다, etx60at, etx...
 미드 경위대에서 좌우 두바퀴만 돌게되는 구조에 대한 검토
미드 경위대에서 좌우 두바퀴만 돌게되는 구조에 대한 검토












