아두이노 메가 2560 보드를 이용한 아스트로eq 콘트롤러의 항성시 구동이 얼마나 정확한지 비교 테스트를 해 보았습니다.
비교모델은 빅센 gp 콘트롤러 입니다.
( 많이 있지만 구형 md-6 라는 1축 모터 입니다. 내부 크리스탈 발진해서 분주해서 클럭을 만들어 냅니다. 5.0469MHz)
결론은 그리 정밀하지 않다 입니다. 안시및 오토가이드를 이용한 사진은 가능하나 고배율 사진은 부족합니다. 어차피 고배율 사진은 주기오차등이
있으니 오토가이드가 필수긴 하지요.
gpd는 웜 기어 144, 감속기 120, 48스텝의 12V 용 모터를 사용합니다. 별기준 구동 모드로 작동 합니다.
별기준은 별의 동->서 이동 속도가 해보다 빠른 상태입니다. 하루에 시간으로 보면 4분 정도 해보다 빠르게 움직입니다.
달과 해는 한달에 한번 추월하니까 달이 해보다 하루에 약 50분씩 느리게 갑니다.
해를 검게 칠했다고(해가 어두워서 해,달 별이 모두 보인다고 가정)보고, 동쪽 지평선에 해와 달과 별이 한곳에 있었다면
별과 해와 달의 순서로 벌어지는 겁니다.
서론이 길어지지만, 우리의 손목시계는 태양의 속도를 기준에 삼았습니다.
하루의 총시간을 초로 표시하면 24 시간 x 60 분 x 60초 = 86400 초 입니다.
여기서 하루는 태양이 오늘 내 머리위에서 부터 내일 내머리위까지 올때 까지의 시간 입니다.
별을 기준으로 하면 어떻게 될까요? 우리는 이것을 꼭 이해 해야 합니다. 외울 필요은 없지만 이해는 해야 합니다.
별이 해보다 빨리 움직인다고 했으니 86400초보다는 짧겠죠. 86164 초 정도 됩니다.
별은 86164 초 동안에 오늘 내머리위에서 부터 내일 내머리까지 움직입니다. 내머리뿐 아니라 니 머리도 위로 움직일테니
자오선 통과라고 합니다.
망원경은 360도 돌게 되어 있습니다 망원경(여기서는 적도의의 적경)으로 별을 보거나 별을 추적하라고 시킬때는
86164초 동안에 한바퀴만 돌아라라는 명령만 하면 됩니다.. 모터로 부터 기어 감속기 등등해서 정해진 배수의 기계장치가
망원경 한바퀴 도는 과정에 들어 있습니다. 콘트롤러는 86164초 동안 기계장치의 최종 축이 한바퀴돌수있게 작전을 짜야 합니다.
콘트롤러가 하는 일은 오직 일정한 간격으로 전기신호를 주는 것인데 86164초 동안에 항상 같은 시간 간격을 만들어야 합니다.
커다란 팽이의 바깥 톱니개수가 86164 인 장치가 있다면 콘트롤러는 1초에 한번씩 앞의 톱니를 옆으로 밀어주는 과정만 하면
그 팽이는 별과 같은 각속도(그위에의 물체는 모두 좀전의 별의 방향을 계속향한다 입니다)를 가질 것입니다.
1개의 축에 톱니를 올리가가 현실적으로 어려우니 여러 감속장치와 전기 구동장치의 일정한 이동각을 이용합니다.
빅센 gpd 의 경우 웜기어는 144, 감속기는 120, 48 스텝 모터를 사용했습니다. 48스탭이란 일반적인 전기를 이용해서 모터축의 위치를
48개로 만들수 있다는 것입니다. 약간의 전기적인 보완으로 48개의 두배인 96개의 위치로도 만들수가 있습니다. 2배 확장한것을
하프스텝(half step)이라고 합니다. 4베, 8배, 16배, 32배,64배등 보완된 기술들이 사용되기도 합니다.
아무튼 gpd 콘트롤러는 하프스탭으로 작동 됩니다(예전에는 하프스텝까지만 확장되었고, 지금은 전류제어방식이 동원되어 더 확장 됩니다)
이제 빅센 gpd가 가지는 톱니의 갯수를 셈해보면 144 x 120 x 48 x 2 = 1,658,880 개가 됩니다. (실재로 이갯수는 아니죠^^)
아무튼 위에서 언급한 늘 일정하게 86164초 동안에 위의 1,658,880 번 동안 일을 시키는 콘트롤러는 몇초간격으로 일를 시켜야 하는지
계산을 해야 할겁니다. 나누면 되죠. 1,658,880개/86164초 = 19.2525 개/초,
gpq의 모터는 1초에 19.2525 개의 펄스전기신호를 받아야 감속기등에 연결된 최종 축이 별을 정확히 따라갈수 있는 겁니다.
그런데, 왜 이리 기냐고요?
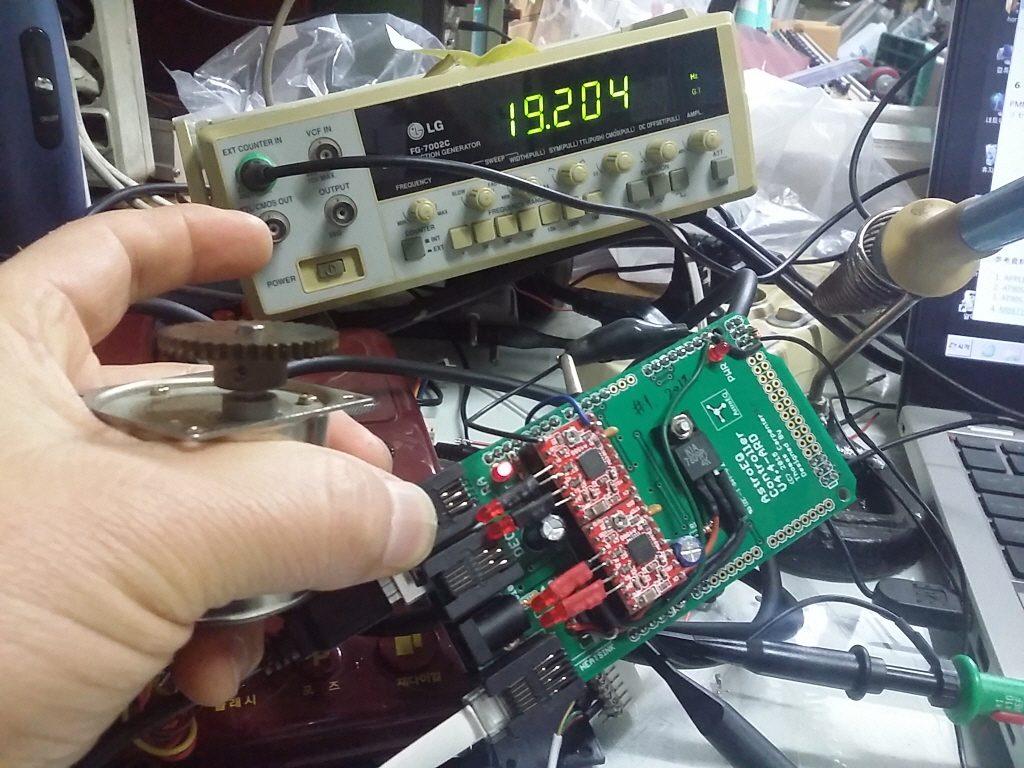
아스트로eq에 빅센 gpd 감속기 값은 넣어서 실제로 돌려보니 1초에 19.2525개의 펄스가 만들어 져야 하는데 19.204 만 만드는것을 보았습니다.
오차의 정도는 (19.2525-19.204)/19.2525 = 0.0485 / 19.2525 = 0.25%
이값이면 맘에는 안들어도 작동에는 거의 문제가 없지만 정말 이값인지 비교할것을 찾아서 비교를 해야 하지요.
혹시 제 측정기의 오차여부를 재확인 해야하고요
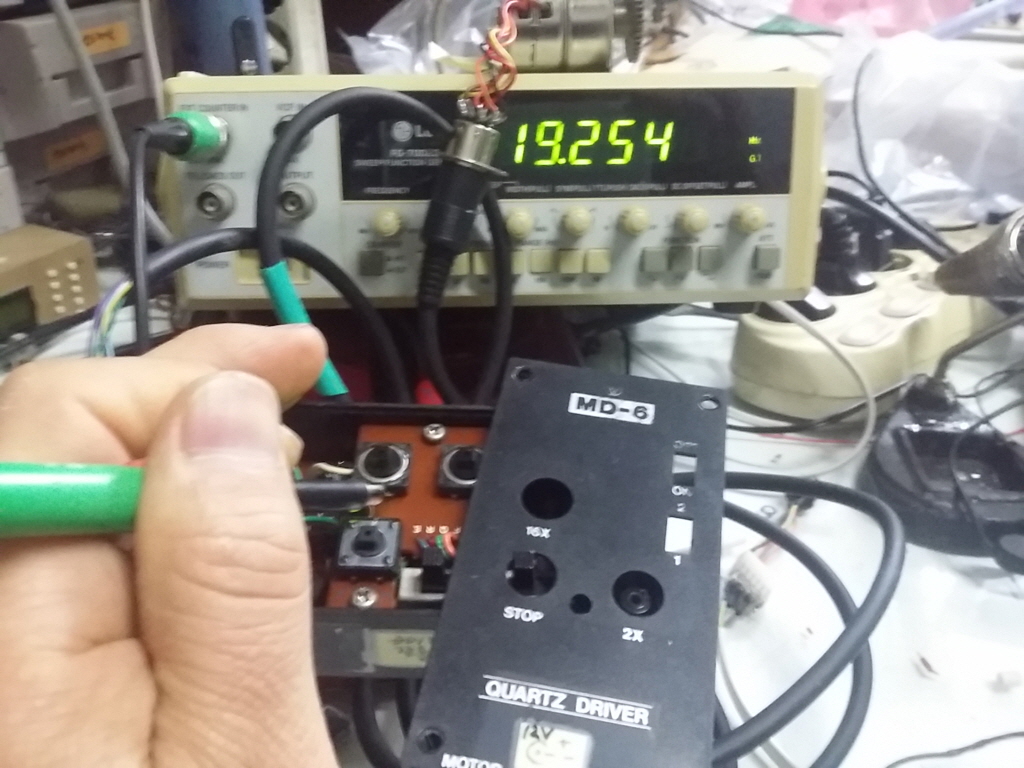
그래서 오지지널 md-6 의 신호를 측정했습니다.
19,254 hz 입니다. 이것의 오차는 (19.2525-19.254)/19.2525 = 0.0015/19.2525 = 0.008% 즉 오리지널은 오차가 거의 없으며,
저의 측정 장치도 이상이 없었습니다.
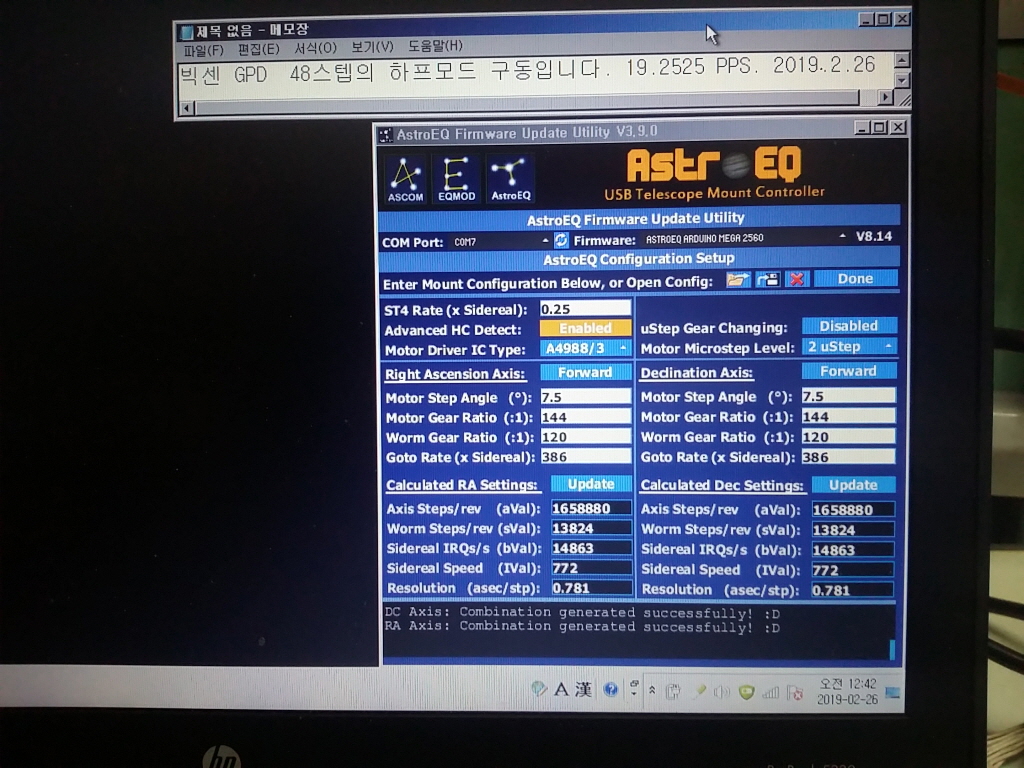
결론 1 ; 아스트로 eq 콘트롤러의 정량적 test. - gpd 조건 구동시 0.25% 정밀도 벗어남. - 19.2525 pps기준 half step ( 2u step )
빅센 md-6 - 19.254 pps (Hz)
아스트로eq ; 19.204 pps (Hz)
GPD 셋팅화면 입니다. 배속은 12V 에서 60배 까진 잘 작동되며 24V 에서는 120배속 무난합니다. 전류제어는 꼭 해야합니다 315mA 정격모터입니다
-
2월26일 15시쯤 추가
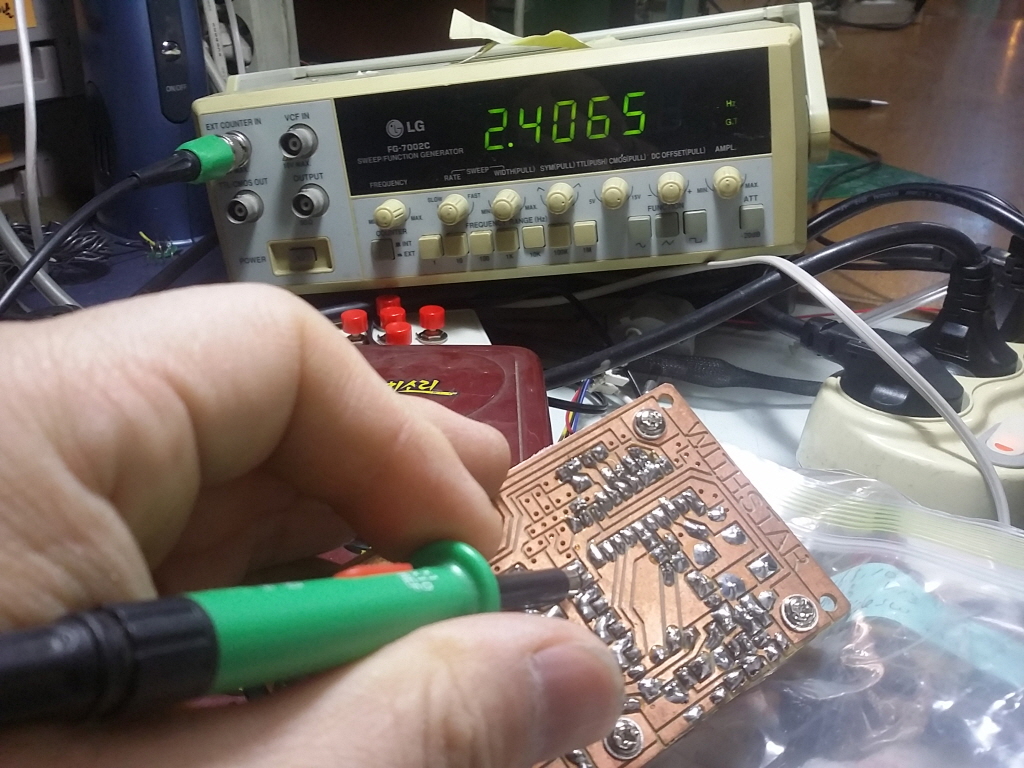
제가 예전에 만든 유니폴러 모터 구동용 핸드콘트롤러(권기식과 함께, with star, 위드스타) 와 정밀도를 비교해 보았습니다.
측정값은 2.4065 hZ 입니다. 이 주기가 8번을 조각내서 모터를 돌리는 신호로 변환됩니다(하프스텝). 2.4065 x 8 = 19.252 입니다.
위에서 계산한 기준값과 비교하면 측정기의 측정오차 한계에 들어가는 값입니다.
일단 19.252 라고 보고 19,2525 와 비교하면 (19.2525 - 19.252 ) / 19.2525 = 0.003 % . 와우 오리지널 0.008% 보다 좋은 값입니다.
당연한 결과 입니다., 저는 인터럽트 안쓰고 오직 0.2usec 씩 나누어서 정확한 펄스를 만들었으니까요. 그래서 적경용과 적위용 각각 한개씩
따로 따로 마이콤을 사용했습니다. pc연결은 안되는 기본 기능만 있습니다. 마이콤 1개,트랜지스터 4개, 20Mhz 크리스탈과
정지용-구동용-고속용 전압가변 조절기 등이 있고요.